축에 평행한 장애물 피하기 (No Sensor)
먼저 축과 평행한 (Axis-Align) 장애물을 피해 타깃에 도달하는 학습을 진행해 보았다.
이번 포스트와 다음 포스트는 센서를 활용하지 않고, 직접 Observation 을 제공해 주는 방법으로 학습해 보았다.
모델은 PPO(Proximal Policy Optimization) 을 사용하였다.
Observation (First Try, Second Try)
먼저 RayPerceptionSensor 없이 아래 정보들을 제공하여 학습을 진행시켰다.
| sensor.AddObservation |
|---|
| target.localPosition |
| transform.localPosition |
| rigidbody.velocity.x |
| rigidbody.velocity.z |
| obstacle.transform.localPosition |
| obstacle.transform.localScale |
| obstacle.transform.localRotation.eulerAngles |
First Try
Policy
| Situation | Reward | EndEpisode |
|---|
| 밖으로 떨어지거나 장애물에 닿음 | -1 | O |
| 타깃에 도달 | +1 | O |
| Living | 틱당 -0.001 | |
Result
그랬더니 장애물에 닿지 않으려고 코너에서 우물쭈물하는 모습을 보였다.
이동하여 떨어지는 리스크를 감수하는 것보다 가만히 있는게 더 높은 리워드를 준다고 판단한 것 같다.
Second Try
Policy
| Situation | Reward | EndEpisode |
|---|
| 밖으로 떨어짐 | -5 | O |
| 타깃에 도달 | +5 | O |
| 장애물에 닿아있는 동안 | 틱당 -0.005 | |
| Living | 틱당 -0.001 | |
그래서 장애물에 닿아도 에피소드를 끝내지 않고, 닿아 있는 동안 (OnCollisionStay) 패널티를 주는 방식으로 변경했다.
장애물에 닿아있는 동안 틱당 -0.005 의 패널티를 부과하였다.
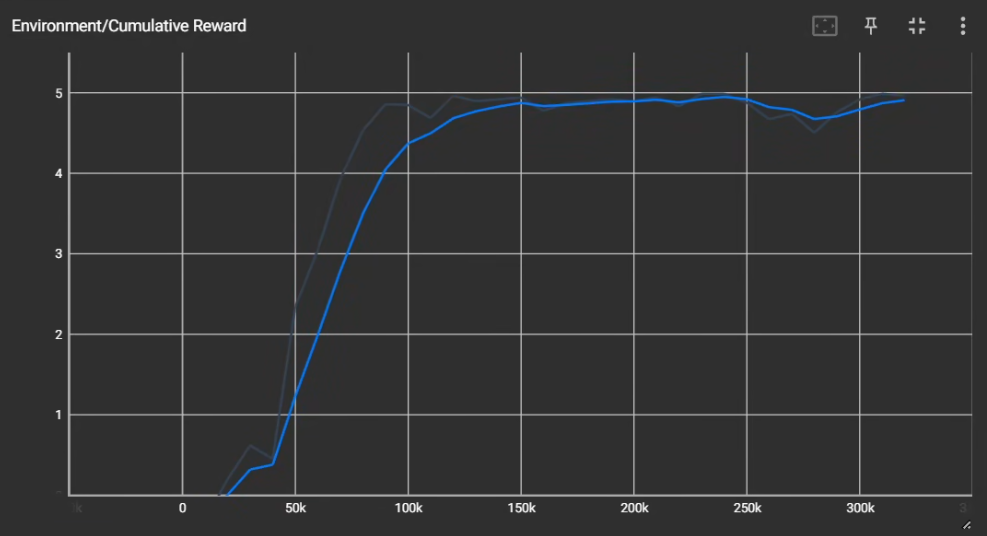
Result
결과는 반은 성공했다고 볼 수 있을 것 같다.
Agent 기준 타깃이 왼쪽에 있다면 왼쪽으로 돌고, 오른쪽에 있다면 오른쪽으로 도는 일반화된 모습을 기대했으나... 타깃의 위치와 상관없이 한 방향으로만 돈다.
즉, Overfitting 으로 일반화에 실패한 것이다.
타깃은 Random 한 위치로 스폰되나, 장애물이나 Agent 의 스폰 위치, 크기 등은 고정되어 있기 때문에 Overfitting 이 발생한 것이다.
해당 내용은 나중에 포스트에서 다루도록 하겠다.